Синхронный, асинхронный
Содержание:
Объяснение принципа работы асинхронного электродвигателя для «чайников»
Вспоминаем описание рисунка в предыдущем примере. Та же рамка, расположенная между полюсами подковообразного магнита, только её концы не имеют полуколец, они соединены между собой.
Теперь начинаем вращать вокруг рамки подковообразный магнит. Вращаем его медленно и наблюдаем за поведением рамки. До некоторых пор рамка остаётся неподвижной, а потом, при повороте магнита на определённый угол, рамка начинает вращение вслед за магнитом. Вращение рамки запаздывает по сравнению со скоростью вращения магнита, т.е. она вращается не синхронно с ним – асинхронно. Вот и получается, что это примитивный асинхронный электродвигатель.
Вообще-то роль магнитов в настоящем асинхронном двигателе служат обмотки, расположенные в пазах статора, на которые подаётся ток. А роль рамки, выполняет ротор, в пазы которого вставлены металлические пластины, соединённые между собой на коротко. Поэтому такой ротор называется короткозамкнутым.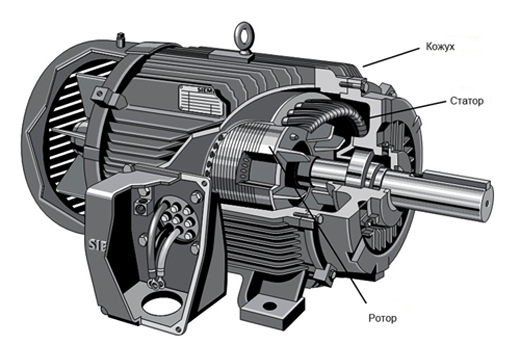
Области применения, особые свойства и преимущества
Использовать как синхронный конденсатор
V-образная кривая синхронной машины
Изменяя возбуждение синхронного двигателя, его можно заставить работать с запаздывающим, опережающим и единичным коэффициентами мощности. Возбуждение, при котором коэффициент мощности равен единице, называется нормальным напряжением возбуждения . Величина тока при таком возбуждении минимальна. Напряжение возбуждения, превышающее нормальное возбуждение, называется повышенным напряжением возбуждения, напряжение возбуждения, меньшее, чем нормальное возбуждение, называется повышенным напряжением возбуждения. Когда двигатель чрезмерно возбужден, противо-ЭДС будет больше, чем напряжение на клеммах двигателя. Это вызывает эффект размагничивания из-за реакции якоря.
Кривая V синхронной машины показывает ток якоря как функцию тока возбуждения. С увеличением тока возбуждения ток якоря сначала уменьшается, затем достигает минимума, затем увеличивается. Точкой минимума также является точка, при которой коэффициент мощности равен единице.
Эта способность выборочного управления коэффициентом мощности может быть использована для коррекции коэффициента мощности системы питания, к которой подключен двигатель. Поскольку большинство энергосистем любого значительного размера имеют чистый запаздывающий коэффициент мощности, наличие перевозбужденных синхронных двигателей приближает коэффициент полезной мощности системы к единице, повышая эффективность. Такая коррекция коэффициента мощности обычно является побочным эффектом двигателей, уже присутствующих в системе, для обеспечения механической работы, хотя двигатели могут работать без механической нагрузки просто для обеспечения коррекции коэффициента мощности. На крупных промышленных предприятиях, таких как заводы, взаимодействие между синхронными двигателями и другими отстающими нагрузками может быть явным образом учтено в электрическом проекте предприятия.
Предел устойчивости установившегося состояния
- Тзнак равноТМаксимумгрех(δ){\ Displaystyle \ mathbf {T} = \ mathbf {T} _ {\ text {max}} \ sin (\ delta)}
где,
- Т{\ displaystyle \ mathbf {T}} крутящий момент
- δ{\ displaystyle \ delta} угол крутящего момента
- ТМаксимум{\ displaystyle \ mathbf {T} _ {\ text {max}}} это максимальный крутящий момент
Вот,
- ТМаксимумзнак равно3VEИксsωs{\ displaystyle \ mathbf {T} _ {\ text {max}} = {\ frac {{\ mathbf {3}} {\ mathbf {V}} {\ mathbf {E}}} {{\ mathbf {X_ { s}}} {\ omega _ {s}}}}}
При приложении нагрузки угол крутящего момента увеличивается. При = 90 ° крутящий момент будет максимальным. Если нагрузка будет приложена дальше, двигатель потеряет синхронизм, поскольку крутящий момент двигателя будет меньше момента нагрузки. Максимальный момент нагрузки, который может быть приложен к двигателю без потери его синхронизма, называется пределом устойчивости синхронного двигателя в установившемся режиме.
δ{\ displaystyle \ delta}δ{\ displaystyle \ delta}
Другие
Синхронные двигатели особенно полезны в приложениях, требующих точного управления скоростью и / или положением.
- Скорость не зависит от нагрузки во всем рабочем диапазоне двигателя.
- Скорость и положение можно точно контролировать с помощью элементов управления без обратной связи; например, шаговые двигатели .
- Приложения с низким энергопотреблением включают в себя позиционирующие машины, где требуется высокая точность, и приводы роботов .
- Они сохранят свое положение, когда постоянный ток приложен как к статору, так и к обмоткам ротора.
- Часы, приводимые в действие синхронным двигателем, в принципе так же точны, как частота сети его источника питания. (Хотя небольшие отклонения частоты будут происходить в течение любых заданных нескольких часов, операторы сети активно регулируют частоту сети в более поздние периоды для компенсации, тем самым поддерживая точность тактовых импульсов с приводом от двигателя; см. электросети .)
- Повышенная эффективность в низкоскоростных приложениях (например, в шаровых мельницах ).
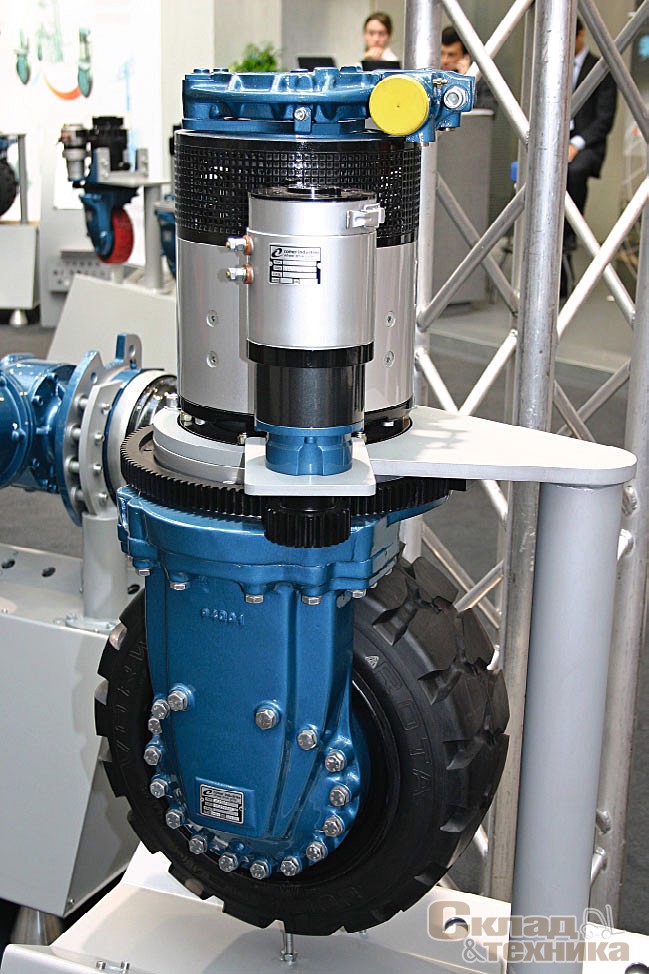
Серводвигатели
Эти двигатели занимают свою особую нишу – они работают в оборудовании, где требуется точное регулирование положения и скорости движений. Эти устройства специально разработаны как электродвигатели с якорем малого диаметра, но развивающие высокий крутящий момент. Чем меньше якорь, тем меньше инерция и, следовательно, электродвигатель быстрее разгоняется, и машина работает быстрее.
Серводвигатели оснащают также системами управления по обратной связи: по сигналам тахометра, датчиков линейных перемещений и аналого-цифрового преобразователя (АЦП). Благодаря управлению по сигналам от этих приборов увеличивается точность движений и регулирования скорости машин. Серводвигатели применяют в оборудовании и системах, где требуется высокая точность движений: в роботизированном оборудовании, штабелерах и подобных складских машинах. Электродвигатели этого типа применяют также в оборудовании и системах, где необходима большая точность синхронизации – в машинах, выполняющих установку (позиционирование) грузов на стеллажах автоматизированных складов.

Синхронный и асинхронный двигатель отличия
Существуют различные виды электродвигателей, и очень часто возникает вопрос, в чем же отличия между синхронным и асинхронным двигателем. В асинхронном обмотки, расположенные в статоре, создают вращающееся магнитное поле, взаимодействующее с токами, образующимися в роторе, благодаря чему он приходит во вращающееся состояние. Поэтому, в настоящее время, наиболее популярным считается простой и надежный асинхронный электродвигатель, имеющий короткозамкнутый ротор.Асинхронный двигатель
В его пазах расположены токопроводящие стержни из алюминия или меди, соединенные своими концами с кольцами из такого же материала, которые производят короткое замыкание этих стержней. Поэтому, ротор и называется короткозамкнутым. Вихревые токи, взаимодействующие с полем, вызывают вращение ротора со скоростью, меньшей, чем скорость вращения самого поля. Таким образом, весь двигатель получил название асинхронного. Это движение получило название относительного скольжения, поскольку скорости ротора и магнитного поля неравны и магнитное поле не пересекается с токопроводящими стержнями ротора. Поэтому, они не создают вращающийся момент.
Принципиальным отличием обоих видов двигателей является исполнение ротора. В синхронном он представляет собой постоянный магнит относительно небольшой мощности или такой же электромагнит. Вращающийся магнит, создающий магнитное поле статора, приводит в движение магнитный ротор. Скорость движения статора и ротора, в этом случае, одинаковая. Поэтому, данный двигатель получил название синхронного.
Особенности синхронного двигателя
Синхронный двигатель отличается возможностью значительного опережения током напряжения по фазе. Повышая коэффициент мощности по типу конденсаторных батарей.
Асинхронные электродвигатели отличаются простотой конструкции и надежностью в эксплуатации. Единственный недостаток этих агрегатов заключается в достаточной трудности регулировки частоты их вращения. Трехфазные асинхронные двигатели могут быть легко реверсированы, то есть вращение двигателя может измениться на противоположное направление. Для этого, достаточно изменить место расположения двух линейных проводов или фаз, которые замыкаются на обмотку статора
В отличие от синхронного, это простой и дешевый двигатель, применяющийся повсеместно.
Синхронный и асинхронный двигатель имеет еще и такое важное отличие, как постоянная частота вращения у первого при различных нагрузках. Поэтому их применяют в приводах машин, требующих постоянных скоростей, например, в компрессорах, насосах или вентиляторах, поскольку они очень легки в управлении.
electric-220.ru
Комплектующие элементы
Принцип работы и устройство синхронного генератора отличаются тем, что этот агрегат может использоваться в качестве мотора и генератора. Его функциональные возможности позволяют быстро переходить от графика двигателя к графику работы генератора — это во многом зависит от действия тормозящей или вращающей силы оборудования. Такой принцип работы высоко ценится среди квалифицированных специалистов. Стоит отметить, что в графике двигателя в систему входит электрическая энергия, а выходит механическая.
Устройство синхронного генератора включает в себя следующие элементы:
- Высококачественная обмотка устройства.
- Ротор либо индуктор (вращающегося или подвижного типа). В комплекте к этому элементу обязательно прилагается обмотка возбуждения.
- Несколько разновидностей мощных кабелей, способных выдержать большую нагрузку.
- Удобный переключатель статорной катушки.
- Специальный выпрямитель.
- Высококачественная роторная катушка.
- Специальный поставщик постоянного тока, работа которого может контролироваться самим пользователем.
Чем отличается синхронный двигатель от асинхронного
На сегодняшний день асинхронные электродвигатели более распространены, однако они не универсальны. В некоторых ситуациях их использование нельзя считать эффективным решением производственных задач. В таких ситуациях промышленное применение синхронных двигателей считается более оправданным. В чем же разница между синхронными и асинхронными двигателями?
Под электродвигателем в целом понимается электрическая машина, преобразующая электрическую энергию в механическую при помощи ротора. Такое устройство применяется в различных промышленных механизмах.
Ключевое отличие синхронного и асинхронного двигателей заключается в принципе работы. Синхронный двигатель состоит из ротора и стартера. На роторе имеется обмотка возбуждения, на которую подается постоянный ток. Таким образом, формируется магнитное поле ротора. На стартере, в свою очередь, также имеется обмотка, формирующая свое магнитное поле только уже посредством подачи переменного тока. Частота вращения ротора синхронна частоте подаче тока, отсюда и название двигателя. Характерной особенностью синхронного электродвигателя является способность поддерживать номинальные обороты вне зависимости от мощности нагрузки.
Асинхронный электродвигатель работает по иному принципу. На роторе такого механизма обмотка отсутствует. Вместо нее находятся соединенные стержни. Ротор такого плана называется «беличья клетка». Он не питается током, а полюса на нем индуцируются магнитным полем статора. Под влиянием механической нагрузки частота вращения рамки меньше частоты вращения магнита, то есть частоты не синхронны.
Следует учитывать, что отличить синхронный двигатель от асинхронного по внешним признакам невозможно. Статоры этих механизмов устроены одинаково. Кроме того, функция этих типов электродвигателей одна и та же — создание вращающегося магнитного поля статора. Единственное весомое отличие асинхронного и синхронного двигателей – устройство ротора.
Выбирая между синхронным и асинхронным электродвигателем необходимо отталкиваться от производственных задач. В случаях, когда для работы требуется поддержание постоянных оборотов при различных нагрузках предпочтительнее использовать синхронные двигатели. К примеру, в строительных кранах или гильотинных ножницах. Надо сказать, что асинхронные двигатели в промышленности распространены гораздо больше. Ими оснащены всевозможные станки, транспортеры, вентиляторы, насосы, словом, любое оборудование со стабильной нагрузкой. В их работе снижение оборотов при повышенной нагрузке не является критичным отклонением.
Важное отличие синхронных двигателей – дороговизна. Производство таких механизмов имеет более высокую стоимость, поэтому приобретение и дальнейшее обслуживание также потребует больших вложений
Выводы:
- Асинхронный и синхронный двигатели отличаются принципом работы.
- В синхронном двигателе частота вращения ротора соответствует частоте подаче тока.
- Синхронный двигатель может поддерживать номинальные обороты при любой нагрузке, асинхронный – нет.
- Асинхронные двигатели в промышленности распространены гораздо больше, чем синхронные.
- Синхронные двигатели дороже, чем асинхронные.
Запуск электродвигателей
Асинхронные электрические машины мощностью до 30-50кВт запускаются прямой подачей электроэнергии. С двигателями большой мощности и синхронными машинами дело обстоит сложнее.
Пуск асинхронных двигателей большой мощности
Для запуска таких машин используются разные способы:
- Включение добавочных сопротивлений в цепь статора. Они ограничивают пусковой ток, а после разгона закорачиваются пускателем.
- В аппаратах, предназначенных для работы в сети с фазным напряжением 660 вольт обмотки в сети 380 вольт соединены треугольником. На время пуска они переключаются в звезду.
- В электромашинах с фазным ротором для запуска в цепь ротора включаются добавочные сопротивления. После разгона они закорачиваются.
- При наличии регулировки скорости, переключением обмоток или изменением частоты, двигатель включается на минимальные обороты. После начала вращения, обороты увеличиваются.
Пуск синхронных электромашин
В отличие от асинхронных машин, пуск которых производится взаимодействием поля статора и обмоток или беличьей клетки ротора, синхронную машину необходимо предварительно разогнать до скорости, близкой к синхронной.
- С помощью дополнительного асинхронного двигателя. Так запускаются машины с постоянными магнитами в роторе. При достижении скорости, близкой к синхронной, асинхронхронник отключается и подаётся напряжение в статор синхронного двигателя.
- Асинхронный пуск. В роторе, кроме электромагнита, находится «беличья клетка». С её помощью аппарат разгоняется, после чего в обмотку подаётся постоянное напряжение, и двигатель начинает работать в качестве синхронного.
- Обмотки ротора закорачиваются напрямую или через добавочное сопротивление. После разгона в них подаётся постоянное напряжение.
- При помощи ТПЧ (тиристорного преобразователя частоты) частота питающего напряжения и скорость вращения плавно поднимается до номинальной. Этот способ применяется в механизмах с регулировкой скорости.
Объяснение принципа работы синхронного электродвигателя для «чайников»
С детства мы помним, что два магнита, если их приблизить друг к другу, в одном случае притягиваются, а в другом отталкиваются. Происходит это, в зависимости от того, что какими сторонами магнитов мы их соединяем, разноимённые полюса притягиваются, а одноимённые отталкиваются. Это – постоянные магниты, у которых магнитное поле присутствует постоянно. Существуют и переменные магниты.
В школьном учебнике по физике есть рисунок, где изображён электромагнит в виде подковы и рамка с полукольцами на концах, которая расположена между его полюсами.
При расположении рамки в горизонтальном положении в пространстве между полюсами магнитов, из-за того, что магнит притягивает разноимённые полюса и отталкивает одноимённые, на рамку подаётся ток, одинакового знака. Вокруг рамки появляется электромагнитное поле (вот пример переменного магнита!), полюса магнитов притягивают рамку, и она поворачивается в вертикальное положение. При достижении вертикали, на рамку подаётся ток противоположного знака, электромагнитное поле рамки меняет полюсность, и полюса постоянного магнита начинают отталкивать рамку, вращая её до горизонтального положения, после чего цикл вращения повторяется.
В этом заключается принцип работы электродвигателя. Причём, примитивного синхронного электродвигателя!
Ротор синхронного электродвигателя будет вращаться с такой же частотой, с какой меняется ток, подаваемый на клеммы обмотки, т.е. синхронно. Отсюда название этого электродвигателя.
7.3.1. Усройство и принцип действия синхронного электродвигателя.
Характерный признак синхронного
двигателя – вращение ротора с
синхронной частотой n1
=
ƒ160
/pнезависимо от нагрузки на валу. Поэтому
синхронные двигатели используют в
системах автоматики для привода
механизмов, требующих строго стабильной
частоты вращения.
Синхронный двигатель, как и асинхронный,
состоит из неподвижного статора и
вращающегося ротора, разделенных
воздушным зазором (у синхронных двигателей
этот зазор несколько больше). Существуют
конструктивные разновидности исполнения
синхронных двигателей малой мощности,
отличающиеся в основном устройством
ротора: явнополюсные с электромагнитным
возбуждением, явнополюсные с возбуждением
постоянными магнитами, явнополюсные
реактивные (с невозбужден-ным ротором),
неявнополюсные гистерезисные.
Рассмотрим синхронные явнополюсные
двигатели с
электромагнитным возбуждением.
Эти двигатели изготавливаются обычно
мощностью в несколько киловатт и более
и поэтому в устройствах автоматики
широкого применения не получили.
Однако основные положения теории этих
двигателей используются при изучении
синхронных двигателей малой мощности
с возбуждением постоянными магнитами
и других типов.
Для изучения принципа действия синхронного
явнополюсного двигателя с электромагнитным
возбуждением используем модель,
представляющую собой две разделенные
воздушным зазором магнитные системы
с явно выраженными полюсами – внешнюю
1и внутреннюю
2(рис.
6). Если внешняя система полюсов неподвижна,
то благодаря силам магнитного притяжения
внутренняя система полюсов (ротор)
расположится так, что ее полюсы будут
находиться под полюсами внешней системы
противоположной полярности. При этом
силы
FMмагнитного притяжения, действу-ющие
на внутреннюю систему, не будут
создавать электромагнитного момента
(рис. 7,а), так как они направлены
радиально (по оси полюсов).
Если внешнюю систему полюсов вращать
с небольшой частотой n1, то в
начальный момент времени эта система
сместится относительно внутренней
на некоторый угол θ (рис. 7,б). При
этом вектор силы магнитного притяженияFMтакже повернется относительно оси
полюса ротора. Теперь эта сила состоит
из двух составляющих:FM=
Fn
+ Ft
причем нормальная составляющая
Fnнаправлена по оси полюса рото-
— 4 —
ра,
а тангенциальная
Ft–
перпендикулярно оси полюса. Совокупность
составляющих
Ftдействующих
на все полюсы ротора, создает на роторе
электромагнитный вращающий моментМ,
приводящий ротор во вращение с
синхронной частотойn1, т. е.
синхронно вращению внешней системе
полюсов.
Рис.
6. Упрощенная модель синхронного
двигателя:
Рис. 7. Возникновение
электромагнитного
а
– внешняя магнитная система;
момента на роторе синхронного
б
– внутренняя магнитная система.
двигателя.
Трехфазный синхронный двигатель
отличается от рассмотренной модели
тем, что в нем вместо внешней системы
полюсов имеется неявнополюсный
статор с распределенной трехфазной
обмоткой, аналогичный статору
асинхронного трехфазного двигателя.
Ротор синхронного двигателя – явнополюсной
конструкции с электромагнитным
возбуждением. При этом на полюсах ротора
2 располагают
полюсные
катушки
3(рис. 8), которые при последовательном
соединении образуют обмотку возбуждения
(ОВ).
При подключении ОВ к источнику постоянного
тока возникает магнитный поток возбуждения
ФВ, силовые линии которого
сцеплены с обмоткой статора1.
При включении обмотки статора в
трехфазную сеть создается вращающееся
с синхронной частотойn1магнитное поле с таким же числом
полюсов, как на роторе. Благодаря
взаимодействию полей статора и ротора
возникает электромагнитный момент,
вращающий ротор ссин-хронной
частотой. В результате электрическая
энергия сети преобразуется в механическую
энергию вращения.
Предположим, что ротор двигателя враща-
Рис.
8.
Магнитная система явнополюсногоется с частотой, отличающейся
от частоты
синхронного
двигателя (2р
= 4): вращения
поля статора, тогда в некоторые
1
– обмотка статора; 2
– полюса ротора; моменты
времени возбужденные полюса ро-
3
– полюсные катушки. тора
окажутся под одноименными полюсами
поля статора, возникнут силы магнитного
от-
— 5 —
талкивания
Суммарный электромагнитный момент
станет равным нулю и ротор остановится.
На рис. 9,
апоказана конструкция ротора синхронного
двигателя с явно выраженными полюсами.
Особенности синхронных моделей
Вышеописанный принцип работы как раз иллюстрирует работу синхронного двигателя. То есть в нем реализуется взаимодействие полюсов индуктора и статорного магнитного поля. Но и в таких системах могут быть свои различия. Например, и синхронный, и асинхронный двигатель могут оснащаться электромагнитами. В случае с синхронными агрегатами такого типа ток будет направляться на ротор, минуя контакт щетка-кольцо. Постоянные же магниты применяются в двигателях, базирующихся на жестких дисках. Также существуют и обращенные конструкции. В них якорные потоки находятся на роторе, а индукция – на статоре.
Для включения синхронного двигателя требуется высокий разгон по частоте, чтобы появилась возможность подстройки вращения двух функциональных компонентов. В конструкциях, где индуктор находится на статоре, поле ротора остается неподвижным относительно якоря. И напротив, если устройство предполагает обратную конструкцию, то «ввод в синхронизацию» будет осуществляться через ожидание статора. Момент ожидания зависит от того, с какой нагрузкой работает вентильный двигатель, и какая частота является оптимальной для активизации его индуктора.

Информационная табличка на двигателе (шильдик)
Полную и достоверную информацию о двигателе можно узнать, если уметь «читать» шильдик. Точнее то, что на нем написано. Начнем описание шильдика рассматриваемого двигателя сверху вниз.
Далее построчно:
- Название двигателя. Значок слева – эмблема завода-изготовителя, справа – знак качества СССР.
- Слева: тип двигателя – в этом наборе букв и цифр кодировалась технологическая информация. В кодировку могли включить данные о: количестве катушек в одной обмотке; количество витков провода в одной катушке; скольким числом проводов намотаны катушки; тип лака, примененного для пропитки и т.д. Справа: заводской номер двигателя.
- Слева направо: количество рабочих фаз; частота рабочего напряжения (Гц); мощность двигателя (W); cos φ – коэффициент мощности тока (параметр показывает, какое количество тока, взятого из сети, используется по назначению). Чем больше мощность, тем выше этот параметр.
- Число оборотов в минуту вала двигателя; характеристики статора – по каким схемам можно соединять обмотки (треугольник или звезда); величина(ы) рабочего напряжения.
- Ток, потребляемый двигателем, соответствующий каждой схеме соединения обмоток (в данном случае – 2,3 А при соединении «треугольником» и 1,33 А – «звездой»); коэффициент полезного действия (КПД), степень пыле- влагозащиты (IP44).
- ГОСТ СССР, по которому сделан двигатель; класс изоляции, режим S1. Режим S1 означает, что это постоянный режим работы. В таком режиме двигатель может оставаться включенным в работу на длительное время.
- Страна-производитель двигателя.
Как проверить двигатель перед запуском
Перед тем, как запустить асинхронный двигатель в работу, желательно его проверить на работоспособность. С чего же начать?
Внешний осмотр двигателя. Проверьте, нет ли сколов, вмятин, покрутите вал двигателя. Он должен крутиться плавно и без рывков в обе стороны. Этим действием вы проверяете подшипники, на которых держится ротор двигателя. Если вал двигателя подклинивает, то на это могут быть несколько причин: разбиты посадочные места под подшипники, убитые подшипники, либо ротор затирает статор. Для того, чтобы выяснить причину, нужно будет полностью разобрать двигатель и выяснить реальную проблему. Если все ок, то двигаемся к следующему шагу.
Проверяем обмотки двигателя. Для этого берем мультиметр, ставим его на измерение сопротивления и проверяем сопротивление обмоток. Если обмотки подключены по схеме “звезда”, то нам будет достаточно замерять сопротивление между клеммами, куда подается напряжение питания. Делается это в три этапа.
Раз.
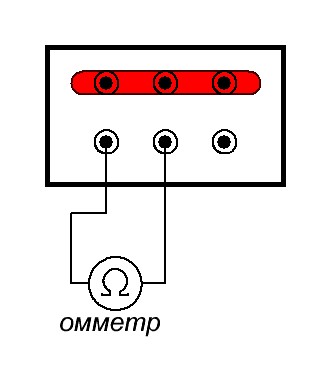
Два.
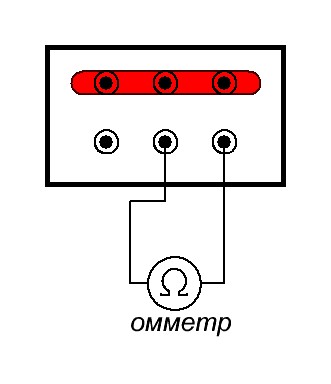
Три.
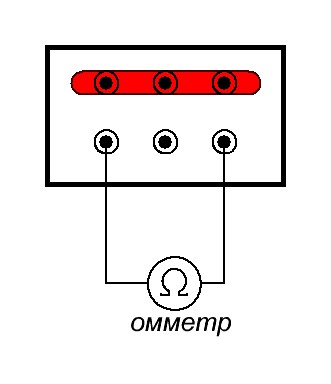
Во всех трех случаях сопротивление должно быть одинаково. Допускается отклонение в несколько Ом.
Этими тремя действиями мы проверили обмотки нашего двигателя и убедились, что они все целые.
И заключительный шаг. Проверяем, не звонятся ли обмотки на землю. Так как все обмотки так или иначе соединяются между собой, достаточно будет встать щупом мультиметра на любую из обмоток, а вторым щупом встать на корпус двигателя. Переключатель на мультиметре поставить на измерение МОм.
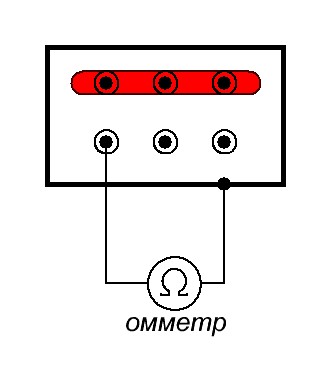
В идеале должно получиться бесконечно большое сопротивление, в реале от 100 МОм и выше. Если сопротивление очень маленькое, что то около 1-10 Ом, то это означает, что какая-то из обмоток двигателя звонится на землю, что категорически недопустимо. На практике если же сопротивление меньше 1 МОм, то надо выяснить причину и устранить ее. Скорее всего в двигатель попала влага, грязь, либо произошел пробой диэлектрика медного провода. В этом случае поможет только полная разборка и визуальное выяснение причины.
Все те же самые операции применяются и к двигателю со схемой подключения “треугольник”.
Большинство материала для статьи” асинхронный двигатель” было взято из видео ниже. Обязательно к просмотру.
Синхронный генератор. Принцип действия
Отличительным признаком синхронного генератора является жёсткая связь между частотой f переменной ЭДС, наведённой в обмотке
статора, и частотой вращения ротора n , называемой синхронной частотой вращения:
n = f / p
где p – число пар полюсов обмотки статора и ротора.
Обычно частота вращения выражается в об/мин, а частота ЭДС в Герцах (1/сек), тогда для количества оборотов в минуту формула примет вид:
n = 60·f / p
Приводным двигателем (ПД), в качестве которого используется турбина, двигатель внутреннего сгорания либо другой источник механической энергии, ротор генератора приводится во вращение с синхронной скоростью. При этом магнитное поле электромагнита ротора также вращается с синхронной скоростью и индуцирует в трёхфазной обмотке статора переменные ЭДС EA , EB и EC , которые будучи одинаковыми по значению и сдвинутыми по фазе относительно друг друга на 1/3 периода (120°), образуют симметричную трёхфазную систему ЭДС.
C подключением нагрузки к зажимам обмотки статора С1, С2 и С3 в фазах обмотки статора появляются токиIA, IB, IC , которые создают вращающееся магнитное поле. Частота вращения этого поля равна частоте вращения ротора генератора. Таким образом, в синхронном генераторе магнитное поле статора и ротор вращаются синхронно. Мгновенное значение ЭДС обмотки статора в рассматриваемом синхронном генераторе
e = 2Blwv = 2πBlwDn
Здесь:B – магнитная индукция в воздушном зазоре между сердечником статора и полюсами ротора, Тл;l – активная длина одной пазовой стороны обмотки статора, т.е. длина сердечника статора, м;w – количество витков;v = πDn – линейная скорость движения полюсов ротора относительно статора, м/с;D – внутренний диаметр сердечника статора, м.
Формула ЭДС показывает, что при неизменной частоте вращения ротора n форма графика переменной ЭДС обмотки якоря (ста-
тора) определяется исключительно законом распределения магнитной индукции B в зазоре между статором и полюсами ротора. Если график магнитной индукции в зазоре представляет собой синусоиду B = Bmax sinα , то ЭДС генератора также будет синусоидальной. В
синхронных машинах всегда стремятся получить распределение индукции в зазоре как можно ближе к синусоидальному.
Так, если воздушный зазор δ постоянен (рис. 1.2), то магнитная индукция B в воздушном зазоре распределяется по трапецеидальному закону (график 1). Если же края полюсов ротора «скосить» так, чтобы зазор на краях полюсных наконечников был равен δmax (как это показано на рис. 1.2), то график распределения магнитной индукции в зазоре приблизится к синусоиде (график 2), а, следовательно, и график ЭДС, индуцированной в обмотке генератора, приблизится к синусоиде.
Частота ЭДС синхронного генератора f (Гц) пропорциональна синхронной частоте вращения ротора n (об/с)
f = pn
где p – число пар полюсов.
В рассматриваемом генераторе (см. рис.1.1) два полюса, т.е. p = 1.
Для получения ЭДС промышленной частоты (50 Гц) в таком генераторе ротор необходимо вращать с частотой n = 50 об/с (n = 3000 об/мин).
Плюсы и минусы синхронных альтернаторов
Качественные СА должны комплектоваться медной, а не слабой алюминиевой обмоткой (будьте внимательны: некоторые производители таким образом пытаются снизить расходы на производство). Именно качественная обмотка и щеточный механизм обеспечивают равномерность тока на выходе (с отклонением не более 5 %), позволяют легко переносить повышенные нагрузки при запуске и непродолжительные колебания напряжения.
Чистый электроток очень важен для таких высокочувствительных пользователей, как ноутбуки, компьютеры, принтеры, телефоны, лабораторное и медицинское оборудование. И даже для такой привычной бытовой техники, как холодильники, ТВ, стиральные машинки также предпочтительным будет электроток, вырабатываемый синхронным генератором. Кроме того, только к щеточным ИБП можно подключать АВР (автоматический ввод резерва).
Итак, к неоспоримым плюсам щеточного узла и медной обмотки СА отнесем:
- стабильность напряжения;
- качественный электроток;
- надежность в работе.
При этом постоянное движение щеток способствует чрезмерному нагреву генератора. Применяющаяся в СА воздушная система охлаждения с вентилятором в целом достаточно надежна, но имеет существенный недостаток – эффект пылесоса. Активное втягивание вовнутрь пыли, грязи, влаги часто становится причиной неполадок в системе.
Но прогресс не стоит на месте, и сегодня ведущие производители находят все новые способы защиты оборудования от внешних факторов.
Выбирая генератор, обязательно интересуйтесь, к какому классу защиты он относится.
Минусы щеточных альтернаторов:
- попадание пыли и влаги;
- необходимость периодического техосмотра и замены щеток;
- высокая стоимость;
- создание помех для радиоволн.



