Что такое can шина?
Содержание:
Как подключить сигнализацию по CAN-шине
Для подключения КАН-шины своими руками к автосигнализации машины с автозапуском либо без него надо знать, где находится блок управления противоугонной системой. Если установка сигнализации осуществлялась самостоятельно, то процесс поиска не вызовет сложностей у автовладельца. Управляющий модуль обычно ставится под приборной панелью в районе рулевого колеса либо за контрольным щитком.
Как произвести процедуру подключения:
- Противоугонная система должна быть установлена и подключена ко всем узлам и элементам.
- Найдите толстый кабель оранжевого цвета, он подключается к цифровой шине.
- Адаптер противоугонной системы подсоединяется к контакту найденной шины.
- Производится монтаж устройства в надежном и удобном месте, девайс фиксируется. Надо заизолировать все электрические цепи, чтобы не допустить их перетирания и утечки тока. Производится диагностика правильности выполненной задачи.
- На завершающем этапе настраиваются все каналы для обеспечения рабочего состояния системы. Также надо задать функциональный ряд устройству.
Загрузка …
Настройка CAN-модуля
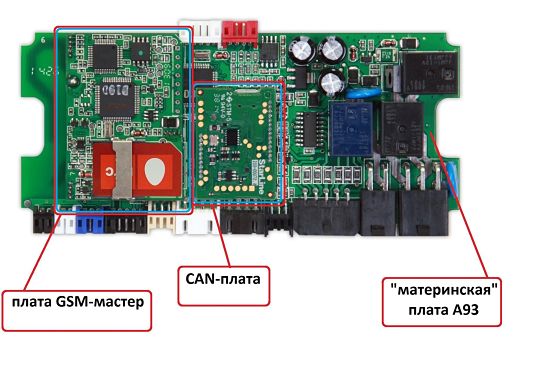
Рассмотрим процесс программирования модуля CAN-шины на примере популярной StarLine A93. Сам модуль устанавливается непосредственно на плату центрального блока, где предусмотрены специальные гнезда. На плате модуля есть USB-разъем, который в дальнейшем позволит обновлять прошивку.
Чтобы войти в режим программирования модуля, временно отключите от сигнализации разъемы питания и CAN-шины. Зажав кнопку Valet, возвращаем на место разъем питания и продолжаем удерживать кнопку, пока не отзвучат пять сигналов сирены.
Система подаст еще 4 сигнала, когда кнопка будет отпущена. Теперь перейдите в соответствующее меню настроек CAN-модуля однократным нажатием кнопки Valet. Затем вводим четырехзначный номер прошивки, быстро нажимая кнопку число раз, соответствующее очередной цифре номера. Например, для кода 1312 нужно нажать кнопку 1 раз, дождаться одиночного сигнала сирены, нажать ее три раза, после трехкратного сигнала нажать дважды, прослушать двойной «кряк» сирены, нажать кнопку еще два раза. После двойного сигнала с небольшой паузой система подаст еще два оповещения, если номер введен правильно, или четыре, если такой номер прошивки не найден.
Далее настраиваются функции модуля, для чего предусмотрено несколько уровней меню:
- Статусные функции: двукратное нажатие Valet
- Управляющие функции: трехкратное нажатие
- Дополнительные функции: четыре нажатия
Можно полностью сбросить CAN-модуль на заводские настройки пятикратным нажатием Valet – если Вы запутались в настройке, и проще начать ее «с нуля»
Меню статусных функций позволяет задать, какие именно информационные сигналы будут считываться с CAN-шины. Например, если Вы подсоединили аналоговый контроль концевиков дверей, считывание информации концевиков с CAN-шины отключите, иначе аналоговый вход не будет работать. Аналогично в меню управляющих функций можно определить, будет ли CAN-модуль управлять «аварийкой», закрытием и открытием центрального замка (причем закрытие и открытие настраиваются отдельно), замком багажника, автозапуском и так далее. В меню дополнительных функций настраивается функция Slave.
Как определить, какие функции нужно реализовать по аналогу, а какие доступны через CAN-шину? Достаточно выбрать на портале can.starline.ru модель автомобиля и тип модуля (2CAN, CAN+LIN и так далее), чтобы узнать номер прошивки, скачать последнюю версию и увидеть перечень функций, доступных в этой прошивке через CAN.
На Chevrolet Cruze до 2015 года с замком зажигания актуальная на момент написания статьи прошивка 1765 потребует включение управление аварийной сигнализацией «по аналогу», а вот управление штатным центральным замком уже можно смело настраивать по CAN-шине, не подключая дополнительные провода. Блокировку запуска придется подключать внешнюю, потому что заглушить мотор через диагностическую шину в этой прошивке тоже нельзя.
Ещё кое-что полезное для Вас:
- Старлайн Е91 — инструкция по эксплуатации и общий обзор
- Автосигнализация Старлай А-94
- Характеристики и обзор Старлайн А-63

В дальнейшем, когда прошивка обновится, появятся дополнительные функции, можно будет просто активировать их в настройках CAN-модуля, не отключая ранее выведенные в штатную проводку аналоговые каналы.
Что такое CAN-шина
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии. Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
- Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.
1 О принципе работы сетевого интерфейса CAN-шина
Кан-шина в автомобиле предназначена для обеспечения подключения любых электронных устройств, которые способны передавать и получать определенную информацию. Таким образом, данные о техническом состоянии систем и управляющие сигналы проходят по витой паре в цифровом формате. Такая схема позволила снизить негативное влияние внешних электромагнитных полей и существенно увеличить скорость передачи данных по протоколу (правила, по которым блоки управления различными системами способны обмениваться информацией).
Кроме того, диагностика ЭБУ различных систем автомобиля своими руками стала проще. За счет применения подобной системы в составе бортовой сети автомобиля высвободилось определенное количество проводников, которые способны обеспечивать связь по различным протоколам, например, между блоком управления двигателем и диагностическим оборудованием, системой сигнализации. Именно наличие Кан-шины в автомобиле позволяет владельцу своими руками выявлять неисправности контроллеров и ошибки с помощью специального диагностического оборудования.
Кан-шина в автомобиле
CAN-шина – это специальная сеть, с помощью которой осуществляется передача и обмен данными между различными узлами управления. Каждый из узлов состоит из микропроцессора (CPU) и CAN-контроллера, с помощью которого реализуется исполняемый протокол и обеспечивается взаимодействие с сетью автомобиля. Шина Кан имеет минимум две пары проводов – CAN_L и CAN_H, по которым и передаются сигналы посредством трансиверов – приемо-передатчиков, способных усиливать сигнал от управляющих устройств сети. Кроме того, трансиверы выполняют и такие функции как:
- регулировка скорости передачи данных посредством усиления или уменьшения подачи тока;
- ограничение тока для предотвращения повреждения датчика или замыкания линий передачи;
- тепловая защита.
На сегодняшний день признаны два вида трансиверов – High Speed и Fault Tolerant. Первый тип наиболее распространен и соответствует стандарту (ISO 11898-2), он позволяет передавать данные со скоростью до 1МБ в секунду. Второй тип приемопередатчиков позволяет создать энергосберегающую сеть, со скоростью передачи до 120 Кб/сек, при этом подобные передатчики не имеют чувствительности к каким-либо повреждениям на самой шине.
История разработки и унификации Controller Area Network
Компания BOSCH, производя исследования в области автоматизации в 80-х годах прошлого века, предложила стандарт микроконтроллерной связи, который можно было применять и в автомобилестроении.
Стандарт CAN применяется не только в автомобилях. В настоящее время его используют в концепции «умный дом», промышленной автоматике и т.д.
Применительно к автомобильной технике стандарт CAN (Controller Area Network) адаптирован к шине с физическим уровнем. Она организована при помощи витой пары проводников, по которым идут пакеты сигналов разной полярности.
Такой стандарт получил международную классификацию ISO 11898. Кадр (пакет) включает 11-битный информационный сигнал (либо 29-битный в расширенном режиме).
В общем, CAN-шина не обязательно может быть реализована при помощи витой пары проводников. Это может быть и оптоволокно, и радиоканал.
Можно предположить, что с введением беспилотных транспортных средств CAN-шина трансформируется в мобильный интерфейс передачи информации одного, а возможно, и комплекса автомобилей.
Инструкция по подключению сигнализации по CAN-шине
При монтаже противоугонной системы простой вариант ее соединения с бортовой сетью — связать охранную установку с цифровым интерфейсом. Но такой метод возможен при наличии КАН-шины в автомобиле.
Чтобы произвести установку автосигнализации и подключить ее к CAN-интерфейсу, необходимо знать место монтажа блока управления системой.
Если сигналку ставили специалисты, то надо обратиться за помощью с этим вопросом на СТО. Обычно устройство располагается за приборной панелью автомобиля или под ней. Иногда установщики ставят микропроцессорный модуль в свободное пространство за бардачком или автомагнитолой.
Для выполнения задачи потребуется:
- мультиметр;
- канцелярский нож;
- изолента;
- отвертка.
Пошаговые действия
Процедура подключения противоугонной установки к CAN-шине осуществляется так:
- Сначала надо убедиться, что все элементы охранного комплекса установлены и работают. Речь идет о микропроцессорном блоке, антенном модуле, сервисной кнопке, сирене, а также концевых переключателях. Если сигнализация имеет опцию автозапуска, надо убедиться в правильности монтажа этого устройства. Все элементы противоугонной установки подключаются к микропроцессорному блоку.
- Выполняется поиск основного проводника, идущего к CAN-шине. Он более толстый и его изоляция обычно окрашена в оранжевый цвет.
- Основной блок автосигнализации соединяется с данным контактом. Для выполнения задачи используется разъем цифрового интерфейса.
- Производится монтаж блока управления охранной системы, если он не был установлен. Его следует разместить в сухом и недоступном для посторонних глаз месте. После монтажа устройство надо качественно зафиксировать, иначе в процессе движения на него будут оказывать негативное воздействие вибрации. В результате это приведет к быстрой поломке модуля.
- Место соединения проводников тщательно изолируется, допускается использование термоусадочных трубок. Рекомендуется дополнительно обмотать изолентой провода. Это позволит увеличить их ресурс эксплуатации и не допустить стирания изоляционного слоя. Когда подключение будет выполнено, осуществляется проверка. Если возникли проблемы в передачи пакетных данных, с помощью мультиметра следует произвести диагностику целостности электроцепей.
- На завершающем этапе выполняется настройка всех каналов связи, в том числе дополнительных, если они имеются. Это позволит обеспечить бесперебойную работу охранной системы. Для настройки используется сервисная книжка, входящая в комплектацию противоугонной установки.
Пользователь Sigmax69 рассказал о соединении охранного комплекса с цифровым интерфейсом на примере автомобиля Хендай Солярис 2017.
Can шина – имеет ли она что-то общее с обычными шинами и для чего нужна
Услышав такое определение, как «CAN шина», неопытный водитель подумает что это ещё один вид автомобильной резины. Но на самом деле, к обычным шинам это устройство не имеет никакого отношения. Это устройство создавалось для того, чтобы не было необходимости устанавливать в машине кучу проводов, ведь управление всеми системами машин должно вестись из одного места. Can шина даёт возможность сделать салон автомобиля комфортным для водителя и пассажиров, ведь при её наличии не будет большого количества проводов, позволяет вести управление всеми системами машины и подключать в удобный способ дополнительное оборудование – трекеры, сигнализации, маяки, секретки и другое. В машина старого образца ещё нет такого приспособления, это доставляет много неудобств. Цифровая шина лучше справляется с поставленными на неё задачами, а стандартная система – с кучей проводов, является сложной и неудобной.
Передача сигналов
Физически проводник CAN-шины современного автомобиля выполнен из двух составляющих. Первый — черного цвета и называется CAN-High. Второй проводник, оранжево-коричневый, именуется CAN-Low. Благодаря представленной структуре коммуникаций из схемы автомобиля удалена масса проводников. При производстве транспортных средств это позволяет уменьшить вес изделия до 50 кг.
Общая сетевая нагрузка состоит из разрозненных сопротивлений блоков, которые входят в состав протокола, называемого КАН-шина.
Различны и скорости передачи-получения каждой системы. Поэтому обеспечивается обработка разнотипных сообщений. Согласно описанию шины-CAN, эту функцию выполняет преобразователь сигналов. Он называется межсетевым электронным интерфейсом.
Расположен этот прибор в конструкции управляющего блока, но бывает выполнен в виде обособленного прибора.
Представленный интерфейс применяют также для вывода и ввода сигналов диагностического характера. Для этого предусмотрено наличие унифицированной колодки OBD. Это особый разъем для диагностики системы.
3 Кан-интерфейс и диагностика системы
Системы управления CAN имеют не только различное нагрузочное сопротивление, но и разную скорость передачи сообщений. Этот факт усложняет обработку однотипных сообщений внутри бортовой сети. Для упрощения диагностики на современных автомобилях используется межсетевой интерфейс (преобразователь сопротивления), который либо выполнен в качестве отдельного управляющего блока, либо встроен в ЭБУ двигателя автомобиля.
ЭБУ двигателя с межсетевым интерфейсом
Подобный преобразователь также предназначен для ввода или вывода определенной диагностической информации по проводу «К»-линия, который подключается во время диагностики или изменения параметров работы сети либо в диагностический разъем либо непосредственно к преобразователю.
https://youtube.com/watch?v=m7dxr8ClEUQ
Таким образом, при проведении диагностических работ своими руками используется унифицированный разъем типа OBD1 или OBD2, который можно встретить на большинстве современных иномарок и отечественных автомобилей. Однако, некоторые модели автомобилей, например Volkswagen Golf 5V, Audi S4, не имеют межсетевого интерфейса. Кроме того, схема блоков управления и CAN-шины индивидуальна для каждой марки и модели авто. Для того, чтобы провести диагностику CAN-системы своими руками, используется специальная аппаратура, которая состоит из осциллографа, анализатора CAN и цифрового мультиметра.
Работы по выявлению неисправностей начинаются со снятия напряжения сети (снятие минусовой клеммы АКБ). Далее определяется изменение сопротивления между проводами шины. Самыми распространенными видами неисправности Кан-шины в автомобиле является замыкание или обрыв линии, выход из строя резисторов нагрузки и снижение уровня передачи сообщений между элементами сети. В некоторых случаях без применения анализатора Can выявить неисправность не получается.
Режимы работы
Существует несколько режимов функционирования терминала:
- FMS — в нем автовладелец может узнать общий расход горючего, обороты, пробег транспортного средства, нагрузку на оси, температуру силового агрегата. Допускается получение данные об объеме горючего в баке. Для работы в данном режиме выполняется вход в меню выбора типа фильтров программы «Конфигуратор». Указывается тип режима FMS, скорость цифрового интерфейса, после чего нажимается кнопка «Применить».
- Режим прослушки используется для получения сообщений, передающий через цифровой интерфейс. Чтобы работать с ним, надо зайти в программе в настройки шины CAN и выбрать один из рабочих параметров. Это может быть скорость интерфейса или время ожидания, тип фильтра в данном случае не играет роли. После указания параметров «кликается» клавиша «Прослушать».
- Для привязки информации, полученной посредством прослушивания цифрового интерфейса, используются пользовательские фильтры. После прослушки данных надо выбрать тип фильтрующей технологии (для 11 или 29 бит). Расшифровка данных производится в соответствии с технической документацией.
- Режим тестирования OBD2 используется для сканирования скорости отправки информации, а также класса идентификатора. Чтобы запустить эту функцию, автовладельцу надо подключиться напрямую к цифровому интерфейсу или диагностическому разъему. Включение режима осуществляется посредством входа в меню «Настройка» и выбора опции «Тест OBD2». В результате терминалом начнется отправка запросов с конкретными идентификаторами на различных скоростях интерфейса. Во вкладке «Устройство» можно ознакомиться с извлеченной и расшифрованной информацией.
Для чего CAN шина в автомобиле
Распространение интерфейса КАН в автомобильной сфере связано с тем, что он выполняет ряд важных функций:
- упрощает алгоритм подсоединения и функционирования дополнительных систем и приборов;
- снижает влияние внешних помех на работу электроники;
- обеспечивает одновременное получение, анализ и передачу информации к устройствам;
- ускоряет передачу сигналов к механизмам, ходовым узлам и иным устройствам;
- уменьшает количество необходимых проводов;
В современном автомобиле цифровая шина обеспечивает работу следующих компонентов и систем:
- центральный монтажный блок и замок зажигания;
- антиблокировочная система;
- двигатель и коробка переключения передач;
- подушки безопасности;
- рулевой механизм;
- датчик поворота руля;
- силовой агрегат;
- электронные блоки для парковки и блокировки дверей;
- датчик давления в колёсах;
- блок управления стеклоочистителями;
- топливный насос высокого давления;
- звуковая система;
- информационно-навигационные модули.
Этот не полный список, так как в него не включаются внешние совместимые приборы, которые тоже можно соединить с шиной. Часто таким образом подключается автомобильная сигнализация. CAN-шина также доступна для подключения внешних устройств для мониторинга рабочих показателей и диагностики на ПК. А при подключении автосигнализации вместе с маяком можно управлять отдельными системами извне, например, со смартфона.
Статья в тему: ГДТ (гидротрансформатор)
Арбитраж и сигналы на шине CAN
CAN – это протокол CSMA/CD, означающий, что каждый узел на шине может обнаруживать коллизии и откатываться на определенное время перед попыткой повторной передачи. Это обнаружение коллизий достигается посредством арбитража приоритетов на основе идентификаторов сообщений. Прежде чем обсудить арбитраж, давайте подробнее рассмотрим доминантные и рецессивные биты, используемые на шине CAN.
Интересным аспектом шины CAN является то, что она использует инвертированную форму логики с двумя состояниями: доминантным и рецессивным. На рисунке ниже показана упрощенная версия вывода и ввода CAN-трансивера. Поток битов ‘101’ поступает с / идет на CAN-контроллер и / или микроконтроллер
Обратите внимание, что когда контроллер отправляет поток битов, они дополняются и помещаются в линию CANH. Линия CANL всегда является дополнением CANH
Чтобы арбитраж работал, устройство CAN должно отслеживать как то, что оно отправляет, так и то, что в данный момент находится на шине, то есть то, что оно получает.

На следующем рисунке показаны сигналы CANH и CANL одновременно, так что вы можете видеть шину CAN в действии. Под сигналами шины изображено дифференциальное напряжение, которое соответствует доминантному и рецессивному состояниям сигналов CAN. Первые три сегмента во времени, t1 – t3, нарисованы так, чтобы соответствовать трем битам, показанным на предыдущем рисунке. Мы рассмотрим это с точки зрения драйвера вывода. Ввод драйвера изначально видит «1» и дополняет его до нуля, который помещается в CANH. CANL видит дополнение CANH и переводится в высокое логическое состояние. Это показано как t1 на рисунке
Обратите внимание, что напряжения CANH и CANL смещены относительно друг друга. В течение времени t1 дифференциал CANH — CANL очень близок к нулю, так как CANH и CANL имеют почти одинаковое напряжение
Этот период, когда драйвер посылает логику «1», в результате чего CANH и CANL близки к одному и тому же напряжению, мы называем рецессивным состоянием CAN.
Следующий отправленный бит – «0». CANH получает свое дополнение, и CANL снова получает дополнение CANH
Обратите внимание, что на этот раз напряжения CANH и CANL не близки друг к другу. Следовательно, дифференциальное напряжение (VDIFF) больше
Это CAN-доминантное состояние. Мы говорим, что логика инвертирована, потому что «1» приводит к понижению логического уровня шины, а «0» — к повышению. Входной приемник работает аналогично.

Как упоминалось ранее, чем меньше 11-битный идентификатор, тем выше приоритет сообщения. Каждый бит, который передает узел, он контролирует. Таким образом, узел обнаруживает, что сообщение с более высоким приоритетом размещается на шине. В тот момент, когда узел отправляет рецессивный бит, но обнаруживает доминантный бит на шине, он «отступает». Это называется неразрушающим арбитражем, потому что «победившее» сообщение продолжает передаваться без каких-либо проблем
Обратите внимание, что рецессивная логика «1» проигрывает доминантной логике «0». Это имеет смысл, поскольку более низкое значение идентификатора представляет более высокий приоритет
Чтобы лучше понять, что это значит, взгляните на следующий рисунок, на котором показаны три узла на шине CAN, пытающиеся получить контроль
Важно помнить, что каждый раз, когда отображается рецессивный бит, контроллер отправляет «1», в то время как доминантные биты соответствуют отправке «0»
Узлы 1–3 все посылают поток битов. Этот поток битов представляет идентификаторы сообщений и их приоритет. Для начала все три узла отправляют «1», который представлен на шине CAN как рецессивный бит. Затем каждый узел отправляет «0» или доминанатный бит. Третий бит, помещенный в шину – это еще один бит «1» или рецессивный бит. На этом этапе ни один из узлов не обнаружил никакого конфликта с другим узлом на шине, поэтому они продолжают передавать.
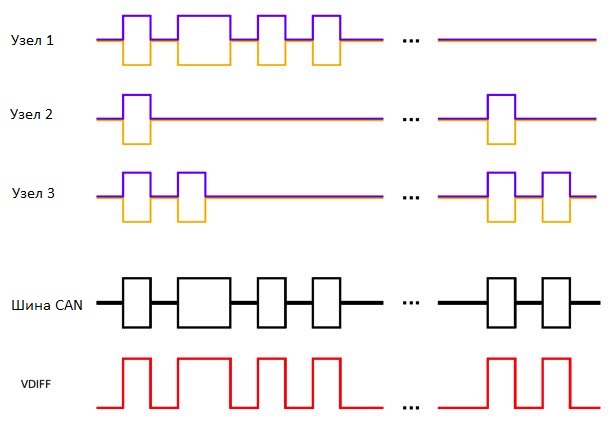
Для четвертого бита узел 1 отправляет «0» или доминантный бит. Узел 2 передает рецессивный бит, но обнаруживает доминантный бит на шине. Он немедленно «отступает», зная, что в данный момент отправляется сообщение с более высоким приоритетом. Узел 3 продолжает передачу, поскольку он считывает тот же доминантный бит, который он передал. Когда пятый бит помещается в шину, узел 3 затем распознает, что он имеет более низкий приоритет, и прекращает передачу. И узел 2, и узел 3 ждут определенное количество времени, прежде чем пытаться снова. Это показано в правой части рисунка, где выиграл арбитраж узел 3. Как видите, логический бит «0», соответствующий младшему идентификатору сообщения, позволяет проводить арбитраж.
Разработка сниффера и изучение протокола CAN шины
После того как я получил доступ к прослушиванию CAN шины, мне нужно расшифровать кто кому и что передает. Формат пакета CAN показан на рисунке.

Все утилиты из набора can-utils сами умеют разбирать CAN пакеты и отдают только полезную информацию, а именно:
- Идентификатор
- Длина данных
- Данные
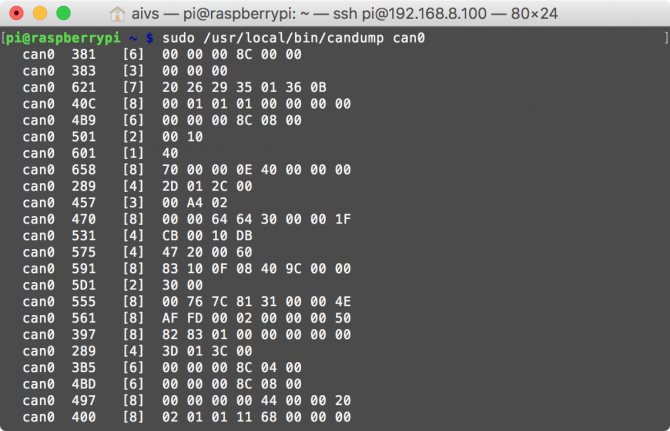
Данные передаются в не зашифрованном виде, это облегчило изучение протокола. На Raspberry Pi я написал маленький сервер который перенаправляет данные с candump в TCP/IP, чтобы на компьютере разобрать поток данных и красиво показать их. Для macOS я написал простое приложение, которое для каждого адреса устройства добавляет ячейку в табличку и в этой ячейке я уже вижу какие данные меняются.

Нажимаю кнопку стеклоподъемника я нашел ячейку в которой меняются данные, затем я и определил какие команды соответствуют нажатию вниз, нажатию вверх, удержанию вверх, удержанию вниз.
Проверить, что команда работает, можно отправив из терминала, например команду поднять левое стекло вверх:
cansend can0 181#0200 Команды, которые передают устройства по CAN шине в автомобилях VAG (Skoda Octavia 2011), полученные методом реверс-инжиниринг: // Front Left Glass Up 181#0200 // Front Left Glass Down 181#0800 // Front Right Glass Up 181#2000 // Front Right Glass Down 181#8000 // Back Left Glass Up 181#0002 // Back Left Glass Down 181#0008 // Back Right Glass Up 181#0020 // Back Right Glass Down 181#0080 // Central Lock Open 291#09AA020000 // Central Lock Close 291#0955040000 // Update Light status of central lock (Когда отправляешь команду открыть/закрыть замок то на кнопке управления замком светодиод не изменяет состояние, чтобы он показал реальное состояние центрального замка, нужно отправить команду обновления) 291#0900000000 Мне было лень изучить все остальные устройства, поэтому в этом списке, только то что мне было интересно.
Неисправности
Поскольку CAN-интерфейс завязан со многими системами автомобиля, при поломке или некорректной работе одного из узлов в нем могут появиться неполадки. Их наличие отразится на функционировании основных агрегатов.
Признаки и причины
О появлении неисправностей могут сообщить такие «симптомы»:
- на приборной панели загорелись одновременно несколько значков без причины — подушки безопасности, рулевое управление, давление в системе смазки и т. д.;
- появился световой индикатор Check Engine;
- на контрольном щитке отсутствует информация о температуре силового агрегата, уровне топлива в баке, скорости т. д.
Причины, по которым могут возникнуть неисправности в работе CAN-интерфейса:
- обрыв проводки в одной из систем или повреждение электролиний;
- короткое замыкание в работе агрегатов на батарею или землю;
- повреждение резиновых перемычек на разъеме;
- окисление контактов, в результате чего нарушается передача сигнала между системами;
- разряд АКБ автомобиля либо падение величины напряжения в электросети, что связано с неправильным функционированием генераторной установки;
- замыкание систем CAN-high либо CAN-low;
- появление неисправностей в работе катушки зажигания.
Подробнее о поломках цифрового интерфейса и тестировании с использованием компьютера рассказал канал «KV Avtoservis».
Диагностика
Чтобы определить причину появления неполадок, потребуется тестер, рекомендуется использование мультиметра.
Процесс проверки:
- Диагностика начинается с поиска проводника витой пары КАН-шины. Кабель имеет черную либо оранжево-серую изоляцию. Первый является доминантным уровнем, а второй — второстепенным.
- С помощью мультиметра производится проверка величины напряжения на контактных элементах. При выполнении задачи зажигание нужно включить. Процедура тестирования позволит выявить напряжение в диапазоне от 0 до 11 вольт. На практике это обычно 4,5 В.
- Выполняется отключение зажигания. От аккумулятора отсоединяется проводник с отрицательным контактом, предварительно гаечным ключом надо ослабить зажим.
- Выполняется измерение параметра сопротивления между проводниками. О замыкании контактов можно узнать, если эта величина стремится к нулю. Когда диагностика показала, что сопротивление бесконечно, то в электролинии имеется обрыв. Проблема может заключаться непосредственно в контакте. Требуется более детально проверить разъем и все провода.
- На практике замыкание обычно происходит из-за поломки управляющих устройств. Для поиска вышедшего из строя модуля следует поочередно отключить от питания каждый блок и выполнить проверку величины сопротивления.
Пользователь Филат Огородников рассказал о диагностике КАН-шины с использованием осциллографа.
https://youtube.com/watch?v=kVjWxMY63-4
X Вам все еще кажется что диагностика авто это сложно?
Если вы читаете эти строки, значит у вас есть интерес сделать что-то самому в машине и реально сэкономить, потому что вам уже знакомо что:
- СТО ломят большие деньги за простую компьютерную диагностику
- Чтобы узнать ошибку надо ехать к специалистам
- В сервисах работают простые гайковерты, а хорошего спеца не найти
И вы конечно устали выбрасывать деньги на ветер, а о том чтобы кататься по СТО постоянно не может быть и речи, тогда вам нужен простой АВТОСКАНЕР ROADGID S6 Pro , который подключается к любому авто и через обычный смартфон вы всегда найдете проблему, погасите CHECK и неплохо сэкономите.
Источник tuningkod.ru
CAN-шина – это электронное устройство, встроенное в электронную систему автомобиля для контроля технических характеристики и ездовых показателей. Она является обязательным элементом для оснащения автомобиля противоугонной системой, но это лишь малая часть её возможностей.
Инструкция по подключению сигнализации по CAN-шине
При монтаже противоугонной системы простой вариант ее соединения с бортовой сетью — связать охранную установку с цифровым интерфейсом. Но такой метод возможен при наличии КАН-шины в автомобиле.
Чтобы произвести установку автосигнализации и подключить ее к CAN-интерфейсу, необходимо знать место монтажа блока управления системой.
Если сигналку ставили специалисты, то надо обратиться за помощью с этим вопросом на СТО. Обычно устройство располагается за приборной панелью автомобиля или под ней. Иногда установщики ставят микропроцессорный модуль в свободное пространство за бардачком или автомагнитолой.
Пошаговые действия
Процедура подключения противоугонной установки к CAN-шине осуществляется так:
- Сначала надо убедиться, что все элементы охранного комплекса установлены и работают. Речь идет о микропроцессорном блоке, антенном модуле, сервисной кнопке, сирене, а также концевых переключателях. Если сигнализация имеет опцию автозапуска, надо убедиться в правильности монтажа этого устройства. Все элементы противоугонной установки подключаются к микропроцессорному блоку.
- Выполняется поиск основного проводника, идущего к CAN-шине. Он более толстый и его изоляция обычно окрашена в оранжевый цвет.
- Основной блок автосигнализации соединяется с данным контактом. Для выполнения задачи используется разъем цифрового интерфейса.
- Производится монтаж блока управления охранной системы, если он не был установлен. Его следует разместить в сухом и недоступном для посторонних глаз месте. После монтажа устройство надо качественно зафиксировать, иначе в процессе движения на него будут оказывать негативное воздействие вибрации. В результате это приведет к быстрой поломке модуля.
- Место соединения проводников тщательно изолируется, допускается использование термоусадочных трубок. Рекомендуется дополнительно обмотать изолентой провода. Это позволит увеличить их ресурс эксплуатации и не допустить стирания изоляционного слоя. Когда подключение будет выполнено, осуществляется проверка. Если возникли проблемы в передачи пакетных данных, с помощью мультиметра следует произвести диагностику целостности электроцепей.
- На завершающем этапе выполняется настройка всех каналов связи, в том числе дополнительных, если они имеются. Это позволит обеспечить бесперебойную работу охранной системы. Для настройки используется сервисная книжка, входящая в комплектацию противоугонной установки.
Пользователь Sigmax69 рассказал о соединении охранного комплекса с цифровым интерфейсом на примере автомобиля Хендай Солярис 2017.



