Асинхронный двигатель
Содержание:
Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, их синхронные «собратья» имеют некоторые преимущества и широко применяются в различных областях промышленности. К отличительным характеристикам синхронного электродвигателя можно отнести:
- Работу при высоком значении коэффициента мощности.
- Высокий КПД по сравнению с асинхронным устройством той же мощности.
- Сохранение нагрузочной способности даже при снижении напряжения в сети.
- Неизменность частоты вращения независимо от механической нагрузки на валу.
- Экономичность.
Синхронным двигателям также присущи некоторые недостатки:
- Достаточно сложная конструкция, делающая их производство дороже.
- Необходимость источника постоянного тока (возбудителя или выпрямителя).
- Сложность пуска.
- Необходимость корректировать угловую частоту вращения путем изменения частоты питающего напряжения.
Однако в некоторых случаях использование синхронных двигателей предпочтительнее:
- Для улучшения коэффициента мощности.
- В длительных технологических процессах, где нет необходимости в частых запусках и остановках.
Таким образом, «плюсы» двигателей такого типа значительно превосходят «минусы», поэтому на данный момент они высоко востребованы.
Изучив синхронный двигатель, устройство и принцип его действия и учтя условия, в которых он будет эксплуатироваться, вы сможете быстро и с легкостью подобрать оптимально подходящий для ваших целей тип агрегата (защищенный, закрытый, открытый) и использовать его с максимальной эффективностью.
Преимущества и недостатки асинхронных электродвигателей
Современные преобразователи электроэнергии в энергию механическую обладают следующими преимуществами:
- Доступная стоимость. Цена асинхронных двигателей намного ниже, чем синхронных.
- Распространённость. Асинхронную электрическую машину можно приобрести на любом специализированном рынке. Полно предложений и в Интернете.
- Надёжность. Двигатель обладает способностью выдерживать небольшой перепад напряжения.
- Простота эксплуатации. Устройство асинхронного типа легко запускается, поскольку, чтобы его включить применяется простейшая схема.
- Довольно высокий уровень КПД. Он значительно выше, чем у синхронных электродвигателей.
К недостаткам относятся:
- Довольно высокое значение пускового тока в условиях номинальной скорости. Первый пуск может привести к перегрузке электросети.
- Почти полное отсутствие защиты. Защищённое исполнение обмоток не спасает двигатель от поломок. Нередко резкие перепады напряжения приводят к сгоранию обмотки.
- Коэффициент скольжения намного ниже, чем у синхронных моторов.
Разновидности синхронных машин
Синхронный компенсатор на подстанции 500 кВ «Златоуст»
Гидрогенератор — явнополюсный синхронный генератор, предназначенный для выработки электрической энергии в работе от гидравлической турбины (при низких скоростях вращения 50-600 об/мин).
Турбогенератор — неявнополюсный синхронный генератор, предназначенный для выработки электрической энергии в работе от паровой или газовой турбины при высоких скоростях вращения ротора — 6000 (редко), 3000, 1500 об/мин.
Синхронный компенсатор — синхронный двигатель, предназначенный для выработки реактивной мощности, работающий без нагрузки на валу (в режиме холостого хода); при этом по обмотке якоря проходит практически только реактивный ток. Синхронный компенсатор может работать в режиме улучшения коэффициента мощности или в режиме стабилизации напряжения. Дает ёмкостную нагрузку.
Машина двойного питания (в частности АСМ) — синхронная машина с питанием обмоток ротора и статора токами разной частоты, за счёт чего создаются несинхронные режимы работы.
Ударный генератор — синхронный генератор (как правило, трёхфазного тока), предназначенный для кратковременной работы в режиме короткого замыкания (КЗ).
Также существуют безредукторные, шаговые, индукторные, гистерезисные, бесконтактные синхронные двигатели.
Бесконтактная синхронная машина
В классической синхронной машине имеется слабое место — контактные кольца со щётками, изнашивающиеся быстрее других частей машины из-за электроэрозии и простого механического износа. Кроме того, искрение щёток может стать причиной взрыва. Поэтому сначала в авиации, а позже и в других областях (в частности, на автономных дизель-генераторах) получили распространение бесконтактные трёхмашинные синхронные генераторы. В корпусе такого агрегата размещены три машины — подвозбудитель, возбудитель и генератор, их роторы вращаются на общем валу. Подвозбудитель — синхронный генератор с возбуждением от вращающихся на роторе постоянных магнитов, его напряжение подаётся в блок управления генератором, где выпрямляется, регулируется и подаётся в обмотку статора возбудителя. Поле статора наводит в обмотке возбудителя ток, выпрямляемый размещённым на валу блоком вращающихся выпрямителей (БВВ) и идущий в обмотку возбуждения генератора. Генератор уже вырабатывает ток, идущий к потребителям.
Такая схема обеспечивает как отсутствие иных механических частей в двигателе, кроме подшипников, так и автономность работы генератора — всё время, пока генератор вращается, подвозбудитель даёт напряжение, которое может быть использовано для питания цепей управления генератором.
Устройство
Основными частями синхронной машины являются якорь и индуктор (обмотка возбуждения). Как правило, якорь располагается на статоре, а на отделённом от него воздушным зазором роторе находится индуктор — таким образом, по принципу действия синхронная машина представляет собой как бы «вывернутую наизнанку» машину постоянного тока, переменный ток для обмотки якоря которой не получается с помощью коллектора, а подводится извне.
Якорь представляет собой одну или несколько обмоток переменного тока. В двигателях токи, подаваемые в якорь, создают вращающееся магнитное поле, которое сцепляется с полем индуктора, и таким образом происходит преобразование энергии. Поле якоря оказывает воздействие на поле индуктора и называется поэтому также полем реакции якоря. В генераторах поле реакции якоря создаётся переменными токами, индуцируемыми в обмотке якоря от индуктора.
Индуктор состоит из полюсов — электромагнитов постоянного тока или постоянных магнитов (в микромашинах). Индукторы синхронных машин имеют две различные конструкции: явнополюсную или неявнополюсную. Явнополюсная машина отличается тем, что полюса ярко выражены и имеют конструкцию, схожую с полюсами машины постоянного тока. При не явнополюсной конструкции обмотка возбуждения укладывается в пазы сердечника индуктора, весьма похоже на обмотку роторов асинхронных машин , с той лишь разницей, что между полюсами оставляется место, не заполненное проводниками (так называемый большой зуб). Неявнополюсные конструкции применяются в быстроходных машинах, чтобы уменьшить механическую нагрузку на полюса.
Для уменьшения магнитного сопротивления, то есть для улучшения прохождения магнитного потока, применяются ферромагнитные сердечники ротора и статора. В основном они представляют собой шихтованную (набранную из отдельных листов) конструкцию из электротехнической стали.
7.1. Принцип действия асинхронного двигателя
Двигатели переменного тока делятся на синхронные и асинхронные двигатели. Асинхронные двигатели (АД) в свою очередь делятся на двух и трехфазные, из которых в качестве исполнительных двигателей в системах автоматического управления в основном применяются маломощные двигатели до 300 Вт.
Их преимущества перед ДПТ: малая инерционность, бесконтактность, дешевизна.
Их недостатки в сравнении с ДПТ: большие тепловые потери, малый пусковой момент, нелинейные характеристики.
Принцип действия рассмотрим на примере двухфазного асинхронного двигателя, с полым ротором в виде алюминиевого стакана. На статоре этого двигателя расположены две обмотки. Эти обмотки расположены на магнитопроводе под углом 90 друг к другу. На эти обмотки подаются синусоидальные напряжения, сдвинутые по фазе на 90 друг к другу. Под действием этих напряжений в обмотках протекают токи I1, I2, также синусоидальные и сдвинутые по фазе на 90. Будем считать, что амплитуды их равны. Эти токи, в свою очередь, создают в магнитопроводе два пульсирующих вектора магнитной индукции и, соответственно два магнитных потока, равных по амплитуде и сдвинутые по фазе на 90 друг к другу в пространстве и времени. Они суммируются, и создается результирующий магнитный поток, имеющий постоянную амплитуду и вращающийся по окружности с частотой w, где w=2p¦, а ¦ — частота сети.
Рассмотрим получение кругового вращающегося магнитного поля в случае двухфазной системы (рис. 70).
Рис. 70. Двухфазная система
При пропускании через катушки гармонических токов каждая из них в соответствии с вышесказанным будет создавать пульсирующее магнитное поле. Векторы ВА и ВВ, характеризующие эти поля, направлены вдоль осей соответствующих катушек, а их амплитуды изменяются также по гармоническому закону. Если ток в катушке В отстает от тока в катушке А на 90, то ВА= Вmsin(wt) и ВВ= Вmsin(wt-90).
Найдем проекции результирующего вектора магнитной индукции Вна оси x и y декартовой системы координат, связанной с осями катушек:
Модуль результирующего вектора магнитной индукции в соответствии с рис. 70 равен,
при этом для тангенса угла a , образованного этим вектором с осью абсцисс, можно записать
, откуда a=wt.
Полученные соотношения показывают, что вектор результирующего магнитного поля неизменен по модулю и вращается в пространстве с постоянной угловой частотой , описывая окружность, что соответствует круговому вращающемуся полю.
Симметричная трехфазная система катушек также позволяет получить круговое вращающееся магнитное поле. Рис. 71. Каждая из катушек А, В и С при пропускании по ним гармонических токов создает пульсирующее магнитное поле. Катушки питаются трехфазной системой токов с временным сдвигом по фазе на 120. Поэтому для мгновенных значений индукций катушек имеют место соотношения
; ; .
Произведя аналогичные расчеты, получим, что модуль результирующего вектора магнитной индукции равен В=1,5 Вm, и также вращается в пространстве с постоянной угловой частотой ,
Рис. 71. Трехфазная система
Силовые линии вращающегося магнитного поля пересекают ротор двигателя, выполненный, например, в виде алюминиевого стакана. В материале ротора наводятся вихревые токи, которые взаимодействуют с вращающимся магнитным потоком статоре и создают движущий момент. Под действием этого момента ротор начинает раскручиваться и набирает скорость до тех пор, пока движущий момент не будет уравновешен моментом, создаваемым нагрузкой.
Скорость вращения ротора асинхронного двигателя всегда меньше скорости вращения поля, так как в случае их равенства результирующий магнитный поток будет неподвижен относительно ротора, вихревых токов не будет, и, следовательно, не будет движущего момента. Поэтому двигатель называется асинхронным. Величина отставания скорости вращения ротора от скорости вращения поля характеризуется скольжением.
При заторможенном роторе S=1, в идеальном случае при вращении со скоростью поля S=0.
Используются различные конструкции ротора АД. Есть трехфазные АД с фазным ротором, при этом на роторе также намотаны три, пространственно сдвинутых обмотки. В эти обмотки обычно включают внешние сопротивления (реостаты), которыми ограничивается пусковой ток и может регулироваться скорость вращения ротора. Двухфазные АД изготавливают с короткозамкнутой обмоткой: в виде беличьего колеса; в виде вала или стакана из проводящего материала. .Рис 72, 73, 74.
Рис. 72. Трехфазный АД с фазным ротором
Рис. 73. Ротор АД в виде беличьей клетки (а) и в виде стакана (б)
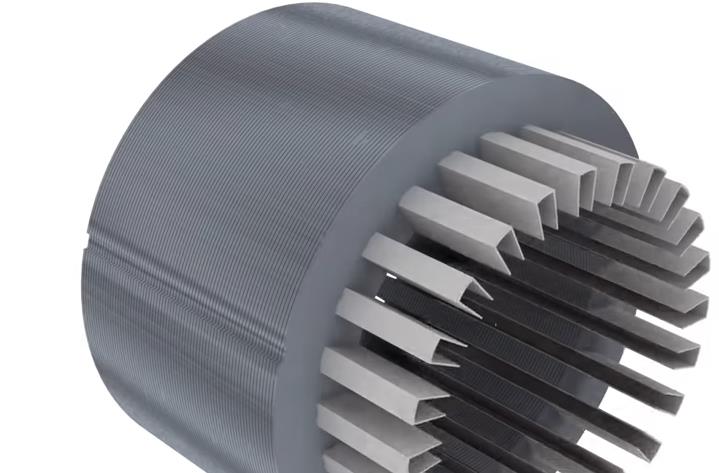
Статор асинхронного двигателя
Статор асинхронного двигателя представляет из себя сердечник, состоящий из пластин электротехнической стали и содержащий в себе медные обмотки, которые определенным образом уложены в пазах статора.

Как было упомянуто, сердечник статора состоит из пластин, которые изолированы друг от друга. С внутренней стороны статора есть пазы

в которые укладывается изоляция
Далее в эти пазы наматывается медный лакированный провод определенным образом, который представляет из себя обмотки статора
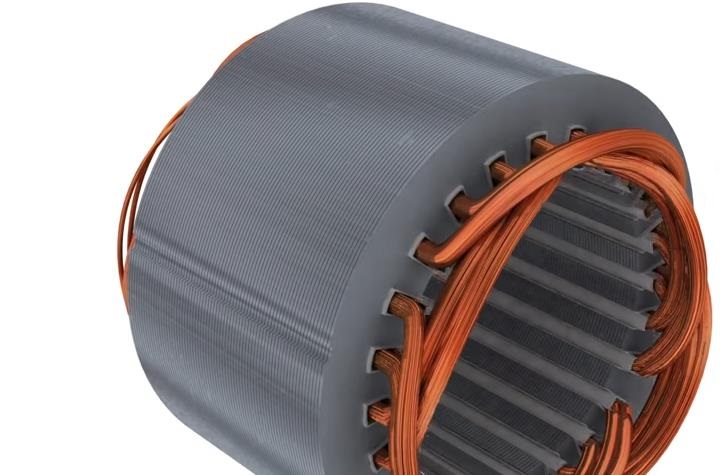
Асинхронный двигатель имеет три “куска” медного провода
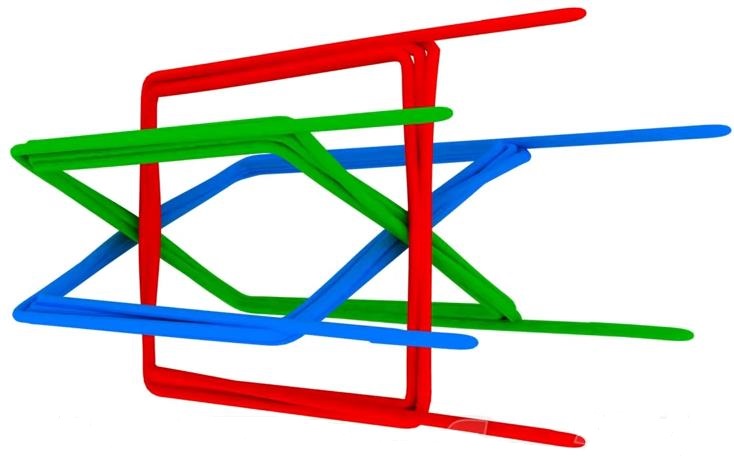
Которые определенным образом уложены в пазы статора под углом в 120 градусов друг относительно друга.

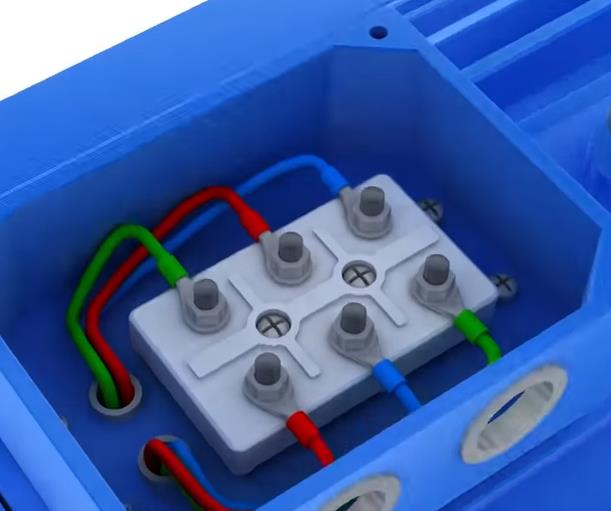
Все 6 концов обмоточных проводов выведены в клеммную коробку, которая находится на корпусе двигателя.
Статор двигателя, а точнее, размеры сердечника, количество катушек в каждой обмотке и толщина моточного провода из которого намотаны катушки определяют основные параметры двигателя. Например, от числа катушек в каждой обмотке зависит номинальное число оборотов двигателя, а от толщины провода, которым они намотаны, зависит номинальная мощность двигателя. Количество обмоток для трехфазного асинхронного двигателя всегда равно трем. А вот количество катушек в каждой из этих обмоток разное. Катушки могут наматывать в один или два провода. Учитывая, что номинальное число оборотов двигателя обратно пропорционально номинальной нагрузке, можно смело сказать, что скорость вращения вала асинхронного двигателя будет уменьшаться при увеличении нагрузки. Если при работе двигателя начнут уменьшаться его обороты из-за роста нагрузки, то не остановка этого процесса может привести к полной остановке двигателя. Двигатель начнет сильно гудеть, вал ротора не будет крутиться – возникнет сильный нагрев катушек, с последующим разрушением изоляции моточного провода, что приведет к короткому замыканию и возгоранию обмоток.
Реальное фото статора одного из асинхронного двигателя выглядит вот так.

История
Модель индукционного (двухфазного) двигателя Н. Теслы. Музей Николы Теслы, Белград.
Первый трёхфазный асинхронный двигатель, изобретённый Доливо-Добровольским. Немецкий музей (Мюнхен).
Трёхфазный асинхронный двигатель Н. Теслы. Музей Николы Теслы, Белград.
В 1888 году Галилео Феррарис опубликовал свои исследования в статье для Королевской академии наук в Турине (в том же году Тесла получил патент США), в которой изложил теоретические основы асинхронного двигателя
Заслуга Феррариса в том, что, сделав ошибочный вывод о небольшом КПД асинхронного двигателя и о нецелесообразности применения систем переменного тока, он привлек внимание многих инженеров к проблеме совершенствования асинхронных машин. Статья Галилео Феррариса, опубликованная в журнале «Атти ди Турино», была перепечатана английским журналом и в июле 1888 года попала на глаза выпускнику Дармштадтского высшего технического училища, выходцу из Российской Империи Михаилу Осиповичу Доливо-Добровольскому
Уже в 1889 году Доливо-Добровольский получил патент на трехфазный асинхронный двигатель с короткозамкнутым ротором типа «беличье колесо» (германский патент № 51083 от 8 марта 1889 года под названием «Anker für Wechselstrommotoren»), а в 1890-м — патенты в Англии № 20425 и Германии № 75361 на фазный ротор с кольцами и пусковыми устройствами. Данные изобретения открыли эру массового промышленного применения электрических машин. В 1903 году в Новороссийске построен элеватор с первой в мире промышленной сетью переменного трехфазного тока, все установки которой изготовлены под руководством Доливо-Добровольского. На данном элеваторе, также впервые в мире, применены трехфазные трансформаторы и асинхронные двигатели с фазным ротором. В настоящее время асинхронный двигатель Доливо-Добровольского является самым распространенным электродвигателем.
Работа трехфазных электродвигателей
 Самое главное достоинство трехфазной системы электроснабжения состоит в том, что создается электрическое поле, имеющее способность вращаться. Если на неподвижном статоре располагаются три обмотки с магнитомягкими (материалы, способны с легкостью перемагничиваться) сердечниками, а в дальнейшем происходит подача напряжения последовательно от каждой из фаз, то сердечники постепенно намагничиваются от поступающего тока и создают магнитное поле, перемещающееся в пределах окружности.
Самое главное достоинство трехфазной системы электроснабжения состоит в том, что создается электрическое поле, имеющее способность вращаться. Если на неподвижном статоре располагаются три обмотки с магнитомягкими (материалы, способны с легкостью перемагничиваться) сердечниками, а в дальнейшем происходит подача напряжения последовательно от каждой из фаз, то сердечники постепенно намагничиваются от поступающего тока и создают магнитное поле, перемещающееся в пределах окружности.
Асинхронный трехфазный электродвигатель применяется в разных отраслях промышленности и в сельском хозяйстве.
Скорость вращения магнитного поля в статоре можно легко снизить, используя чисто конструктивные методы, к примеру, увеличив число обмоток на окружности вдвое (из трех до шести).
Асинхронные двигатели
Изобретатель М. О. Доливо-Добровольский придумал, как можно усовершенствовать двигатель избавившись от коллекторов, имеющих ряд недостатков. Так, он предложил обмотку ротора выполнять в виде короткозамкнутых витков, ток в которых будет заводить переменное магнитное поле статора. Внешне такое решение представляет собой два кольца, соединенных между собой поперечными проводниками, — «бельчье колесо». Такой устройство еще называется двигателем с короткозамкнутым ротором.
Принцип действия примерно следующий: при запуске переменное поле статора возбудит в проводниках сильный ток, что приведет к намагничиванию сердечника ротора, он будет притянут статорными магнитами и начнет вращение. Чтобы ток стабильно появлялся в замкнутых витках, необходимы постоянные колебания магнитного поля, поэтому ротор вращается медленнее магнитного поля. Именно от такого «запаздывания» двигатели начали называть асинхронными, а разница вращений — скольжение.
Скольжение является переменной величиной. При запуске оно достигает максимальных значений, постепенно уменьшаясь и достигая минимальных значений на холостом ходу (примерно 3%). Если есть нагрузка на вал, скольжение пропорционально увеличивается и возрастает вместе с нагрузками (около 7%).
Особенности трехфазных асинхронных двигателей
Конструкция этого типа оказалась настолько удачной, что большинство электроприводов всего мира производятся на базе трехфазных асинхронных устройств, имеющих короткозамкнутый ротор. Они имеют ряд преимуществ, в частности, обладают:
- Исключительной простотой, надежностью и долговечностью;
- Удобством обслуживания и ремонта;
- Возможностью изменять направление вращения ротора. Для это нужно всего лишь переключить два любые фазные провода;
- Возможностью работы в качестве генератора: при применении электромагнитного торможения мотор начнет отдавать энергию в сеть.
Простота переключения фазных проводов может быть как преимуществом, так и недостатком
Производя замену силового кабеля, нужно особое внимание уделять оборудованию, запомнить, как оно ранее было подключено. Делая монтаж, следует обязательно перепроверить на запасном двигателе фазировку проводов, ведь оборудование может запросто выйти из строя, если сделана неверная фазировка
Слабые стороны асинхронного трехфазного двигателя:
- Значительный пусковой ток, превышающий номинальный примерно в 5 раз. Это значит, что нужно устанавливать защитные автоматы двигателей только класса D.
- Малый момент на валу при запуске. При значительной инерции понадобится двигатель большей мощности.
Принцип действия асинхронного двигателя
Рассмотрим устройство, показанное на рис. 17. Оно состоит из постоянного магнита 1, медного диска 2, рукоятки 3 и подшипников 4. Если вращать магнит при помощи рукоятки, то медный диск начинает вращаться в ту же сторону, но с меньшей частотой. Медный диск можно рассматривать как бесчисленное множество замкнутых витков; при вращении магнита 1 его магнитные силовые линии (м.с.л.) пересекают витки диска, и в витках наводится электродвижущая сила (э.д.с.). В замкнутых витках диска появляется ток, а вокруг проводников с
током — магнитное поле, которое взаимодействует с магнитным полем магнита и приводит диск во вращение.
Обозначим:
n1— частота вращения магнита (синхронная частота), об/мин;
n2— частота вращения диска, об/мин;
n — разность частот вращения магнита и диска, об/мин.
Частота вращения диска меньше частоты вращения магнита, и, следовательно, диск вра-
Рис. 17. Модель асинхронного двигателя
щается с несинхронной (асинхронной) частотой. Разница частот магнита и диска представляет собой частоту, с которой м.с.л. пересекают витки диска. Отношение разницы частот к синхронной частоте называется скольжением. Скольжение может быть выражено в долях единицы или в процентах:
В двигателях вращающееся магнитное поле создается трехфазным током, протекающим по обмотке статора, а роль диска выполняет обмотка ротора. Активная сталь статора и ротора служит магнитопроводом, уменьшающим в сотни раз сопротивление магнитному потоку.
Под влиянием подведенного к статору напряжения сети U1 в его обмотке протекает ток I1. Этот ток создает вращающийся магнитный поток Ф, замыкающийся через статор и ротор. Поток создает в обеих обмотках э.д.с. E1 и E2, как в первичной и вторичной обмотках трансформатора. Таким образом, асинхронный двигатель подобен трехфазному трансформатору, в котором э.д.с. создаются вращающимся магнитным потоком.
Пусть поток вращается в направлении движения стрелки часов. Под влиянием э.д.с. E2 в обмотке ротора пойдет ток I2, направление которого показано на рис. 18. Предположим, что он совпадает по фазе с E2. Взаимодействие тока I2 и потока Ф создает электромагнитные силы F, приводящие ротор во вращение, вслед за вращающимся потоком. Таким образом, асинхронный двигатель представляет собой трансформатор с вращающейся вторичной обмоткой и способный поэтому превращать электрическую мощность E2I2cosφ в механическую.
Рис. 18. Работа асинхронного двигателя при cosφ2 = 1
Ротор всегда отстает от вращающегося магнитного потока, так как только в этом случае может возникать э.д.с. E2, а следовательно, ток I2 и силы F. Чтобы изменить направление вращения ротора, следует изменить направление вращения потока. Для этого меняют местами два любых провода, подводящие ток от сети к статору. В этом случае меняется порядок следования фаз АВС на АСВ или ВАС, и поток вращается в обратную сторону.
Ротор двигателя вращается с асинхронной частотой n2, поэтому и двигатель называется асинхронным. Частоту вращения магнитного потока называют синхронной частотой n1. Частота вращения ротора
Теоретически скольжение меняется от 1 до 0 или от 100% до 0, так как при неподвижном роторе в первый момент пуска n2 = 0; а если вообразить, что ротор вращается синхронно с потоком, n2 = n2.
Чем больше нагрузка на валу, тем меньше скорость ротора n2 и следовательно больше S, так как больший тормозной момент должен уравновеситься вращающим моментом; последнее возможно только при увеличении E2 и I2, а значит и S. Скольжение при номинальной нагрузке Sн у асинхронных двигателей равно от 1 до 7%; меньшая цифра относится к мощным двигателям.
Запуск электродвигателей синхронного типа
Самое сложное в работе синхронного мотора – это его запуск.
Именно поэтому его используют крайне редко. В
едь конструкция усложняется за счет системы запуска.
На протяжении долгого времени работа синхронного двигателя зависела от разгонного асинхронника, механически соединенным с ним.
Что это значит? Второй тип двигателя (асинхронный) позволял разогнать ротор синхронной машины до подсинхронной частоты.
Обычные асинхронники не требуют специальных устройств для запуска, достаточно только подать рабочее напряжение на обмотки статора.
После того, как будет достигнута требуемая скорость, происходит отключение разгонного двигателя. Магнитные поля, которые взаимодействуют в электрическом моторе, сами выводят его на работу в синхронном режиме. Для разгона потребуется другой двигатель. Его мощность должна составлять примерно 10-15 % от аналогичной характеристики синхронной машины. Если нужно вывести в режим электродвигатель 1 кВт, для него потребуется разгонный мотор мощностью 100 Вт. Этого вполне достаточно, чтобы машина смогла работать как в режиме холостого хода, так и с незначительной нагрузкой на валу.
6.2.Однофазные асинхронные двигатели
Однофазные асинхронные двигатели широко распространены в системах автоматики, вычислительной технике, бытовых электроприборах. Однофазными на практике принято называть двигатели, питающиеся от однофазной сети переменного тока. Как правило, по своему устройству эти двигатели являются двухфазными – на их статоре располагают не одну,
адве сдвинутые в пространстве обмотки (фазы) переменного тока. У одних двигателей при их работе обе обмотки постоянно находятся под напряжением, т. е. двигатели пускаются в ход и работают как двухфазные. У других при пуске находятся под напряжением обе обмотки, а при работе лишь одна. Такие двигатели пускают в ход как двухфазные.
Всхемах автоматики двухфазные двигатели работают чаще всего в несимметричных режимах, т. е. при эллиптических вращающихся полях,
ане при круговых (как в трехфазных машинах). Несимметричные режимы могут быть следствием двух причин:
1)несимметрично выполненной машины;
2)несимметричной двухфазной системы напряжений.
На статор симметричной машины укладывают две одинаковые обмотки, смещенные пространственно на угол θ = 90º эл. При симметричной системе напряжений на обмотку статора подают двухфазное напряжение с временным сдвигом β = 90º. Если выполнены оба условия, машина работает в симметричном режиме, полностью аналогичном работе трехфазной машины при круговом вращающемся магнитном поле. При невыполнении одного из этих условий машина работает в несимметричном режиме, характеризующемся наличием тормозящего момента на валу двигателя. При отсутствии второй фазы на статоре поле в зазоре машины пульсирующее, не создающее пускового вращающего момента.
Пульсирующую МДС обмотки представляют в виде двух вращающихся в разные стороны составляющих:
|
F = F cosωt = Fm e jωt + |
Fm e− jωt = F |
+ F . |
(6.4) |
||
|
m |
2 |
2 |
1 |
2 |
|
Одну составляющую F1, вращающуюся в ту же сторону, что и ротор, называют прямо вращающейся (прямое поле), а вторую составляющую F2 − обратно вращающейся (обратное поле). При отсутствии насыщения магнитопровода можно оперировать соответствующими магнитными потоками. Такое представление полей позволяет применить методы, знакомые по исследованию трехфазных машин.
Применим этот метод к асинхронному двигателю, в пазах которого располагается одна обмотка – фаза, питающаяся от сети переменного тока.



